The
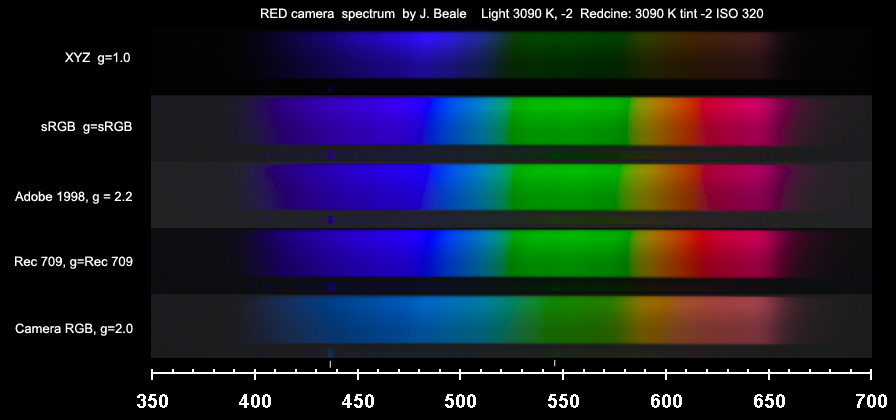
Red camera was fixed at 5' from the target, with the lens set at 18 mm
and 50 mm, exposure T4 + 2/3. The measured light level and foamcore
background was the same as in Test
#3. Below the color chart is the 8" long Kodak Q-13
Gray Scale, which has 20 regions with density ranging from
0.05 (nearly white) to 1.95 (dark grey) in steps of 0.1 OD or 1/3 stop,
so the full Q13 range is 6.3 stops.
Immediately to the right of the Q-13 chart is a hole cut in the
foamcore, with an empty black box and
matching opening placed directly behind the hole (see top-view diagram
at right). The hole
creates a good reference black level, since the rear inside of the box
visible to the camera is not directly illuminated. On the foamcore to
the right of the hole is a piece of black gaffer tape. In practice the
hole area was an eerie total black; absolutely nothing inside was
visible to the eye.
Since the surrounding area is white, this test can be used to
check for lens flare by comparing the recorded level in the small black
hole area with Test 1,
an entirely black frame (lens cap on). |
 |


")


")

